Here we are again, another year has finished. And I? What have I done? I haven’t been posting here the past year. Blogging seems not to be part of my routine any more. There are several reasons for this, but maybe it is not the incident a few years ago that made me drop the habit, maybe it is also, just the fact I’m not a student any more. Having a job means having less time at hand, and as such, also having less time to write in my blog. But maybe it is also the incident. Maybe it is also that I no longer publicly share what is on my mind.
It is not entirely true that I have no longer been blogging, as I have been, on my other blog. But there I discuss matters of technology. My projects, and stuff. I guess, that’s stuff that used to go here, so maybe, not much has changed after all.
So, the year 2019 is running towards an end. What has happened in the past year. In November, my work, Manus VR, moved to Geldrop. The company is growing, outgrowing its startup phase, so that’s all good. I’ve seen colleagues come and go. Mostly come, but some also left, including some who were around in the early days before I joined the company, and in that sense, I’m one of the old guys around.
What else is there to say about 2019? The usual, I guess, my yearly festivals, Castlefest and Midwinter fair. Is that all there is to say about the past year? I guess… that is what growing older means. Work from 9 to 5 and have no time or energy left for other things.
What I mean, when looking back, I don’t look back much on the past year. What is there to say about the past year? I have difficulties to point out significant events in the past year, things that stick out, things worth mentioning when looking back on the past year. When I look back, these days, I look back at a bigger timescale. My life, my choices and things that just happened to me. How did I end up here? Is this still where I want to be? Or is it time to move on?
I am here… living in Eindhoven. I’ve moved here in 2010 to study. When I moved here, I had the idea to study in this city, and then move back to Limburg. But then in 2011 I changed my mind. I made some new friends, and I decided to stay. I joined some group wanting to start an urban farming project. And so Beginhoven began. It was a nice project, and it was nice hanging out with my friends in the garden. However, lately I’ve been thinking, it is not my place to be. I’m considering leaving the project. I’m going to find myself again. Looking at my own values, not at the values of those around me. That also implies that I might take distance from some people who have developed in an opposite way than me, in such a way our values are no longer compatible. I guess, what I am saying, I guess it is time for change. New people in my life.
I guess, it also means, looking for what is important to me. What my passion is about. And that’s not really in gardening. I guess, I’ll still try to grow some tomatoes on my balcony. So far I didn’t have that much success. I guess my balcony doesn’t get enough sun as the tomatoes weren’t ripe yet at the end of summer. But, I guess I’ll focus more on technology. Going back to, who I would have become if I didn’t take this detour. It’s not a bad thing to take a detour, that’s not what I am saying, but what I am saying, I’ll need to consider what is really me. A part of self reflection and cutting out the parts that are not me any more.
And I have changed over the past decade. I must admit I have been having silly ideas in the past. Ideas I’ve shed. I’ve never been a religious person, but nowadays I consider myself a full atheist, while in the past I went with agnostic and spiritual. I guess that’s a thing of the past now. To quote Nietzsche “Gott ist tot.”
Looking at the world… what has happened in 2019. Still no Brexit, but it is coming. In 2020, there will be elections in the USA again. Will Trump get another term, or will the Americans realise what he really is? Oh… the world… what the fuck is happening? It’s not only Trump or Brexit… it is the anti-vaxxers, it is the anti-GMO, it is the anti-5G, it is the climate deniers, the flat-earthers and all the other crazy nutters who think they know better then scientists. If climate change won’t destroy our civilisation, it will destroy itself with all those crazy ideas spreading. I have said before, every great civilisation of the past has fallen, the Egyptians, the Romans, the Mayas, and our faith will be no different. But looking at the world today, one might think it has already begun. — Oh well, I shouldn’t be too pessimistic. A few rotten apples won’t destroy our civilisation just like that. We’re still going forwards. Look where we came from, and where we are today. We have come so far, and we’re still going forwards.
The future is bright. At least, it can be, if our society focuses on the right things. This means, we should seriously consider nuclear energy if we wish to cut dependence on fissile fuels. Wind and solar alone just won’t cut it. We should consider GMO crops. To combat malnutrition (golden rice), to fight malaria, to be able to grow food as the climate changes. But also, to cure hereditary disease, or even disease like aids and cancer. Shall I put it differently, how ethical is it, that an ethics commission is still discussing whether we should consider GMO while people are dying? All I am saying, don’t be afraid for new technologies. Don’t believe in conspiracy theories telling you they’re out there making up new technologies to kill you. Just think about it, there are cheaper and more effective ways to kill someone.
Welcome to the 2020s. Welcome to a new decade. The year 2020 doesn’t sound as magical as the year 2000, but yet, a new decade. What has the future is store for us? We’ll see soon enough. Happy New Year!
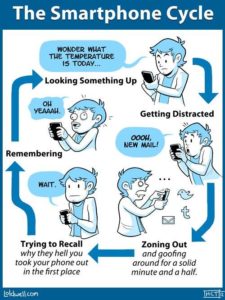
 endlessly through fake news and other nonsense. I haven’t cancelled my Facebook account, I might look at it from time to time, but I’ve removed Facebook from my daily routine. And damn, Facebook is an addictive bitch. I logged in to post some Christmas wishes, and before I knew it I found myself scrolling for a few miles.
endlessly through fake news and other nonsense. I haven’t cancelled my Facebook account, I might look at it from time to time, but I’ve removed Facebook from my daily routine. And damn, Facebook is an addictive bitch. I logged in to post some Christmas wishes, and before I knew it I found myself scrolling for a few miles.